I'm a first year Ph.D. student in Computer Science at
Arizona State University advised
by Prof. Nakul Gopalan. My core interests include robot learning,
3D perception and software engineering.
For my Master's thesis, I worked on learned motion planning for robotic manipulators.
I developed deep learning-based behavior cloning algorithms that zero-shot generalize
to configuration-space of unseen robotic arms. My work involved generating large-scale synthetic
datasets, training robot policies, and developing 3D collision detection models for neural motion planning.
I received my Bachelor's in Computer Science and Engineering from
National Institute of Technology, Rourkela
in Spring 2020.
I love connecting with others about research, and collaborating on ideas. Feel free to get in touch!
🎉 Technical report on AI safety evaluation for AVs accepted at SAE WCX 2024.
Research
My current research interest is in robot learning, with a focus on developing robot foundation models that generalize to unseen domains.
I believe such models can ultimately scale robotics by enabling proactive learning from one-shot or few-shot demonstration prompts,
eliminating the need for explicit retraining. Here are some of my recent and past works in robotics,
computer vision, and the Internet of Things (selective papers are highlighted):
Factorizing Diffusion Policies for Observation Modality Prioritization
Omkar Patil, Prabin Kumar Rath, Kartikay Milind Pangaonkar, Eric Rosen, Nakul Gopalan Under Review RSS RoboReps Workshop, 2025
We present a theoretical framework to learn action diffusion models without the need to jointly condition on all input modalities. Our method is robust to deploy against visual distractors and appearance changes, maintaining strong performance even under significant visual disruptions and outperforming standard diffusion policies by over 40%.
XMoP: Whole-Body Control Policy for Zero-shot Cross-Embodiment Neural Motion Planning Prabin Kumar Rath, Nakul Gopalan International Conference on Robotics and Automation (ICRA), 2025 RSS Workshop on Embodiment-Aware Robot Learning, 2024
A novel neural policy that solves motion planning problems zero-shot for unseen robotic manipulators. We demonstrate for the first time that configuration-space behavior cloning policies can be learned without embodiment bias and that these learned behaviors can be transferred to novel unseen embodiments in a zero-shot manner.
Evaluating Safety Metrics for Vulnerable Road Users at Urban Traffic Intersections Using High-Density Infrastructure LiDAR System Prabin Kumar Rath, Blake Harrison, Duo Lu, Yezhou Yang, Jeffrey Wishart, Hongbin Yu SAE World Congress Experience, 2024
Real-time VRU safety metrics evaluation strategies for urban traffic intersections.
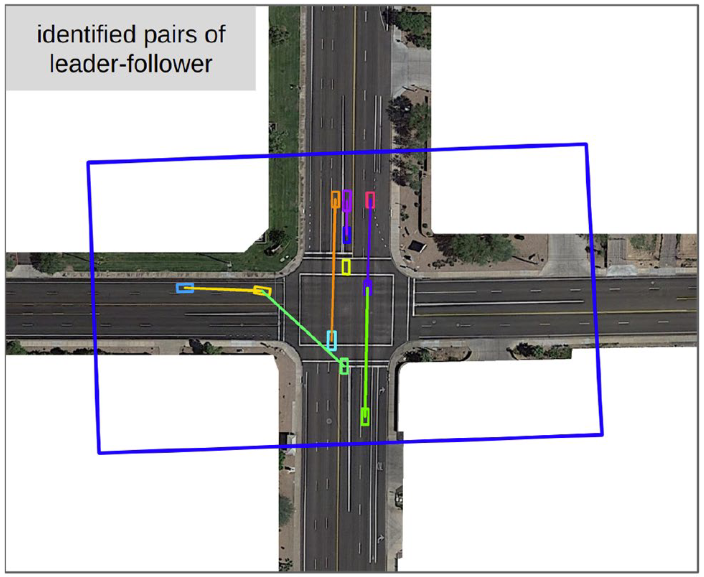
Validation and Analysis of Driving Safety Assessment Metrics in Real-world Car-Following Scenarios with Aerial Videos
Duo Lu, Sam Haines, Varun Chandra Jammula, Prabin Kumar Rath, Hongbin Yu, Yezhou Yang, Jeffrey Wishart SAE World Congress Experience, 2024
Leader-follower pair identification and metrics evaluation from aerial drone videos.
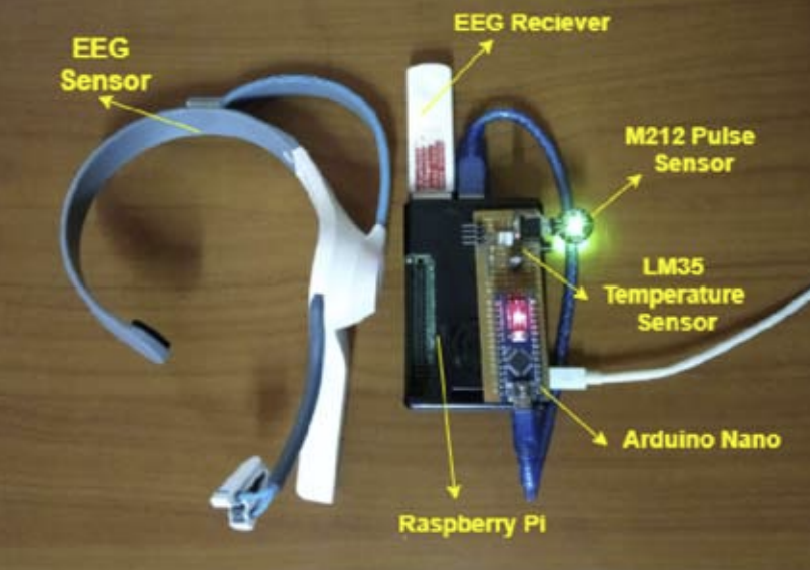
Design and Performance Analysis of an IoT Based Health Monitoring System for Hospital Management Prabin Kumar Rath, Neelam Mahapatro, Subham Sahoo and Suchismita Chinara IEEE International Conference on Computing Communication and Intelligent Systems, 2021
An IoT health kit for hospitals to assist doctors with medical diagnosis.
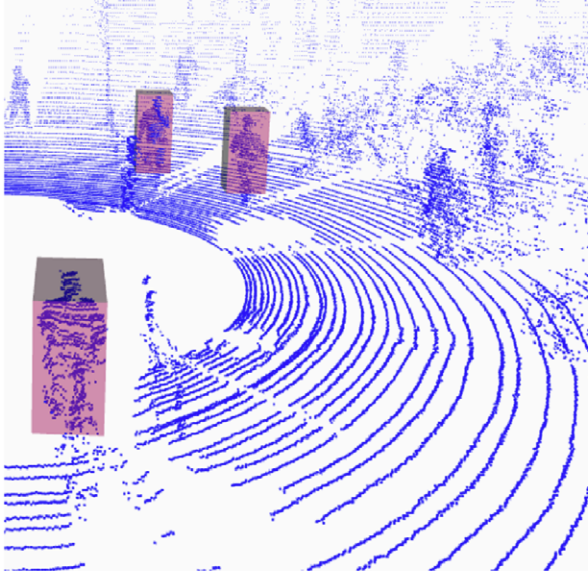
Real-time moving object detection and removal from 3D pointcloud data for humanoid navigation in dense GPS‐denied environments Prabin Kumar Rath, Alejandro Ramirez-Serrano, and Dilip Kumar Pratihar Engineering Reports, 2020
Detection and Tracking of Moving Objects (DATMO) algorithm for robot navigation in dynamic environments.
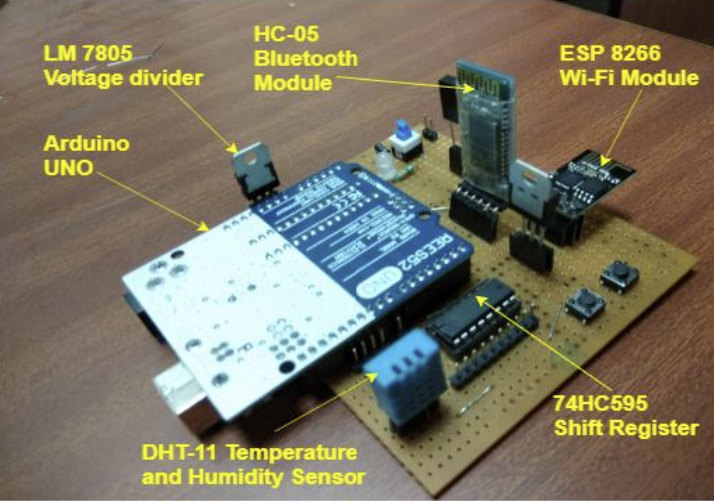
Automation System for Secure Remote Control and Surveillance Prabin Kumar Rath, Neelam Mahapatro and Soumya Nandan Mishra IEEE International Conference on Computer Electrical & Communication Engineering, 2020
Room Automation Module for switching electrical appliances remotely through Web, Bluetooth, and IR.
Autonomous Chess Playing Robot Prabin Kumar Rath, Neelam Mahapatro, Prasanmit Nath and Ratnakar Dash International Conference on Robot & Human Interactive Communication (RO-MAN), 2019
— Listed under top 10 projects in Quest Ingenium 2018
A robot for playing the game of chess physically with an user. Powered with strong chess engines and interactive UI it provides all virtual game features while ensuring the authenticity of the original board game.
Trajectory optimization for the cart pole swing-up problem using Direct collocation, and balancing the inverted pendulum on the cart using LQR control.
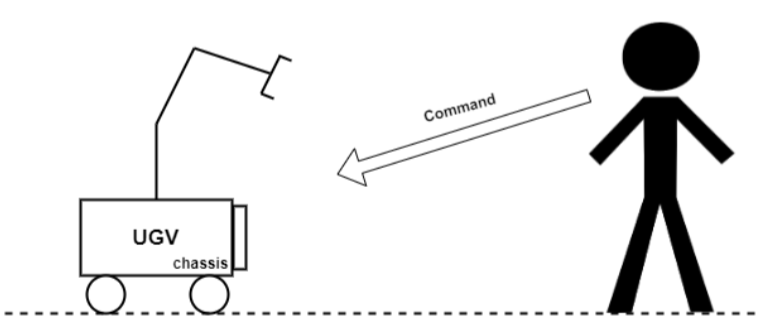
Simple LSTM model for classifying colloquial english sentences onto motion commands. Curated text to command dataset for model training using Tensorflow.
4-DOF Cube Stacking Arm Arizona State University, 2023
Customized replica of Turtlebot arm for pick and place tasks. ROS Control and MoveIt stack. Gym compatible environment for training RL agent in Gazebo.
A Bluetooth controlled robot with on board FSR (Force Sensitive Resistor) for weight detection. It has indication LEDs to prompt the user about the detected weights.